Você está no 3DFinder
Buscamos em Thingiverse, MakerWorld e Printables ao mesmo tempo para te dar o melhor de cada uma.
Descrição
可堆叠手动进退料系统
此模型基于V2.3版本下的评论反馈及亲身使用后作出的全面优化及升级
V3.0版本为基于Cyber Brick开发的遥控版本 纯手动版本为V2.3
V3.0延续了V2.3为解决手动进退料时不需要打开密封盒 降低耗材受潮风险的目的
-重做了整体外观 匹配新版内核 融并了上个版本的冗余部件
-重做了耗材导引通道 融并了气动接头的螺母 减少五金使用 优化了漏斗导引模型
-重做了多层堆叠的连接结构 采用了耗材盒的气密结构 某程度上增加了气密性
-增加了基于CyberBrick开发的遥控功能
-增加了基于CyberBrick组件极限的通道数量 最大可遥控8通道耗材进退
-优化了关键齿轮模型 活动挤出齿轮改为丁腈O型圈摩擦带动 效果更稳定
-适配了统一外观的遥控器模型
关于造价 我是买了CyberBrick的新手套装外加单独买了部分组件
成本大概已经可以搓一个或者买一个BMCU 请谨慎选择
我是完全不懂手搓电路板的 所以才选择用CyberBrick作为功能开发
而且我是没有多色打印需求 也听说BMCU会有随着打印机固件升级而失效的情况
最终才选择开发这个方案 如果你有其他功能需求 请谨慎选择
操作演示:
使用过程
所需额外材料:
| 编号 | 名称 | 数量 | 编号 | 名称 | 数量 | |
 | PC4-M6贯穿式气动接头 | 16个 | 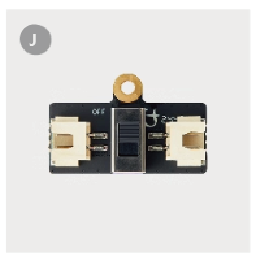 | 电源开关板XH2.542Pin | 1个 | |
 | PETG耗材丝 | 40cm |  | 电池盒-AAA电池-3节串联 | 1个 | |
 | 特氟龙管 | 20cm |  | 9g离合数字舵机 180度 | 4个 | |
 | 丁腈O型圈 外径14*线经1.9mm | 8个 |  | WS2812 LED灯转接板SH1.03Pin | 2个 | |
 | 多功能主控板 | 2个 |  | WS2812 RGBW LED灯板-IDC0.8-4PIN | 8个 | |
 | 遥控接收底板 | 1个 |  | 双通道摇杆SH1.03Pin | 3个 | |
 | 遥控发射底板 | 1个 |  | 按键板SH1.02Pin | 4个 | |
 | 14500 7.4V800mAh锂电池 + 7.4V锂电池充电器-XH2.54 | 1组 |  | 608zz轴承 | 8个 | |
 | 030直流有刷马达 | 2个 |  | M2.5x6半圆头机牙螺丝 | 24 | |
 | 1:48单轴减速齿轮包 | 2组 |  | AAA电池 | 3个 | |
 | 外设连接线-XH2.54-2PIN-100mm | 2条 |
|  | 外设连接线-SH1.0-3PIN-100mm | 12条 |
 | 外设连接线-SH1.0-2PIN-10CM | 2条 | X |  | 4x2mm圆形磁铁 | 8粒 |
模型摆件说明:打印配置【RMS】
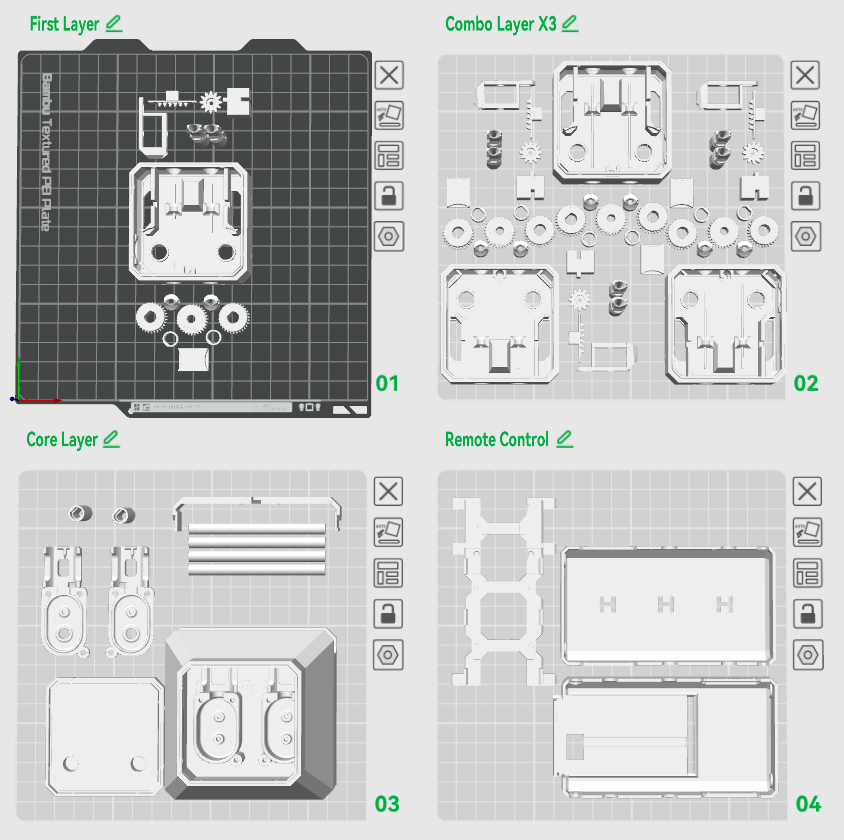
1盘:首层
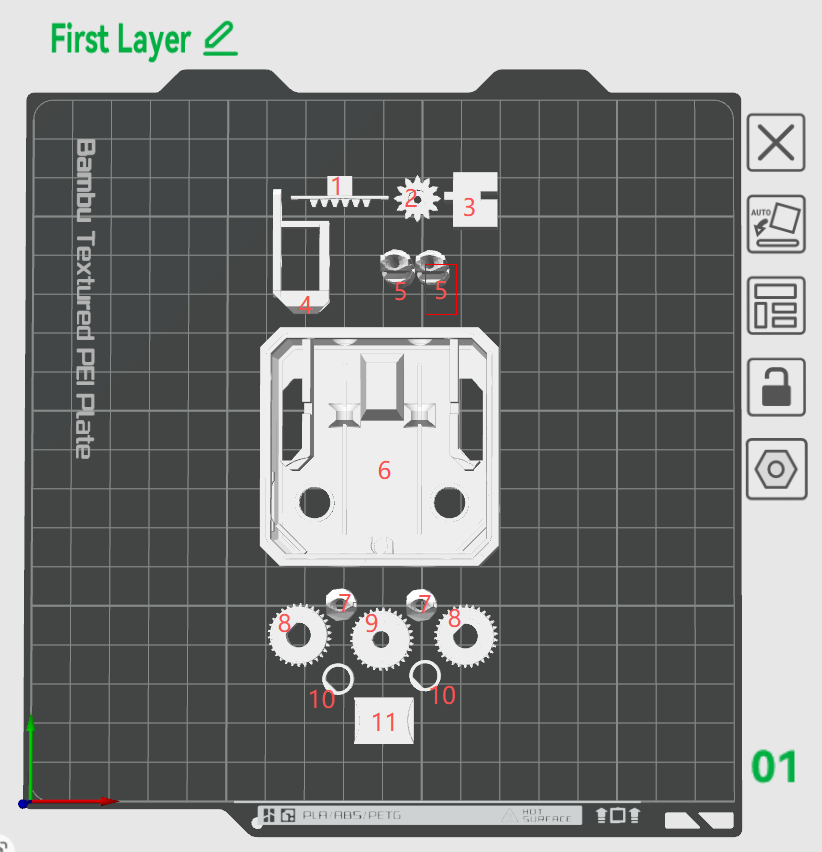
1:舵机齿条
2:舵机齿轮
3:舵机补偿
4:通道选择件
5:长料口
6:底板
7:短料口
8:固定齿轮
9:活动齿轮
10: 608轴承补偿
11:轴承固定件
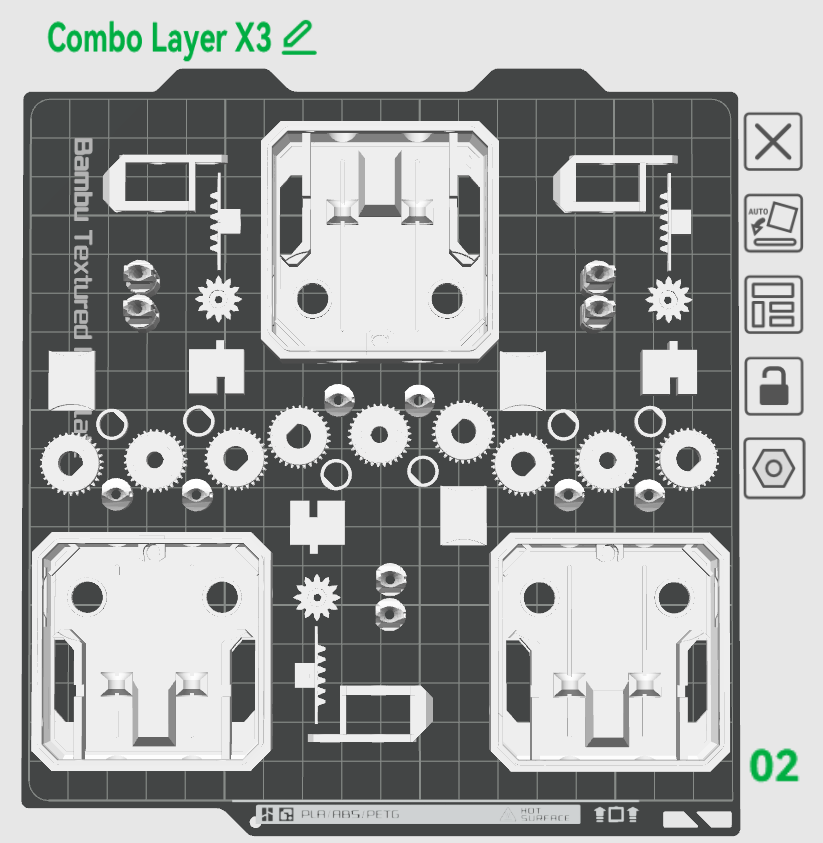
2盘:堆叠层X3
3盘:核心层
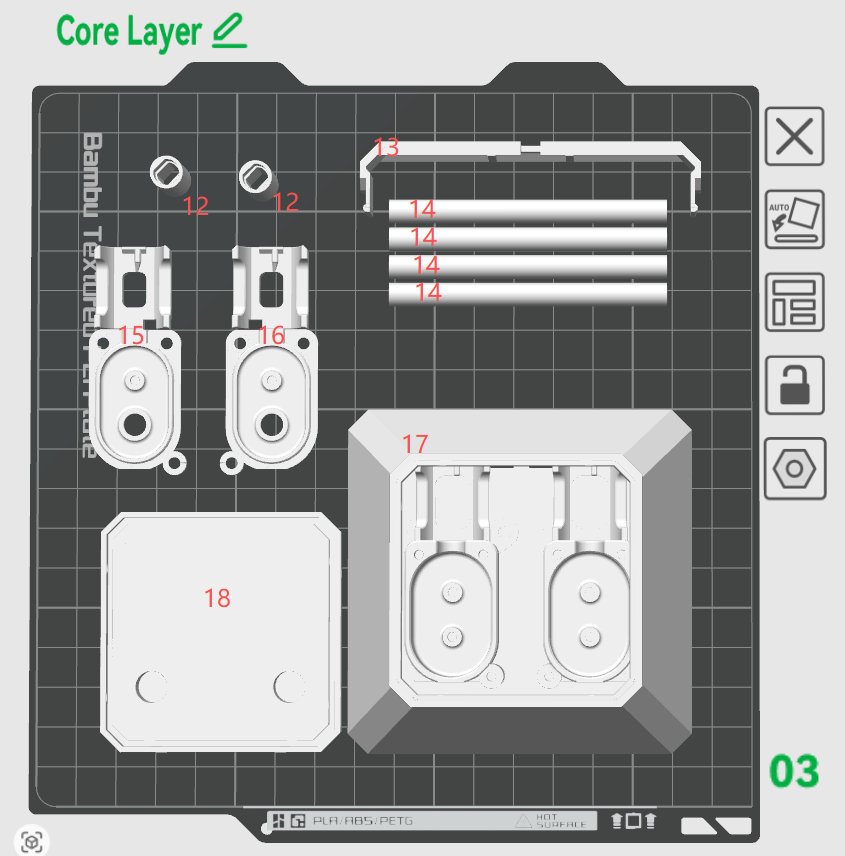
12:马达转换轴
13:开关盖
14:转动轴(可换金属)
15:左电机盖
16:右电机盖
17:核心底板
18:顶盖(3盘附带暂停层 顶盖内可镶嵌直径4mm厚2mm磁铁 用于与遥控器磁性固定)
4盘:遥控器
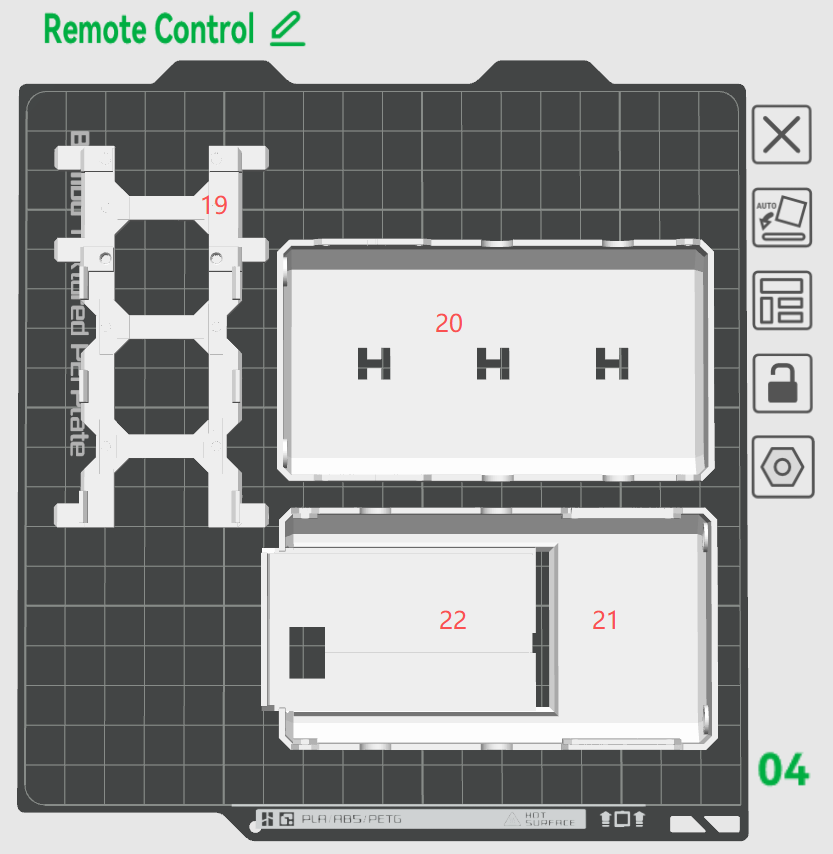
19:CyberBrick组件支架
20:面板
21:背板
22:电池盖
注意:虽然整体采样了Z缝槽设计 但鉴于每台设备的或存在的细微差别 模型件或许依旧存在由于Z缝摩擦力而产生的功能效果降低
在条件允许下请尽可能在组装前打磨关键孔洞 轴 齿轮象脚 或添加润滑剂等减少摩擦力的方法
组装图解:
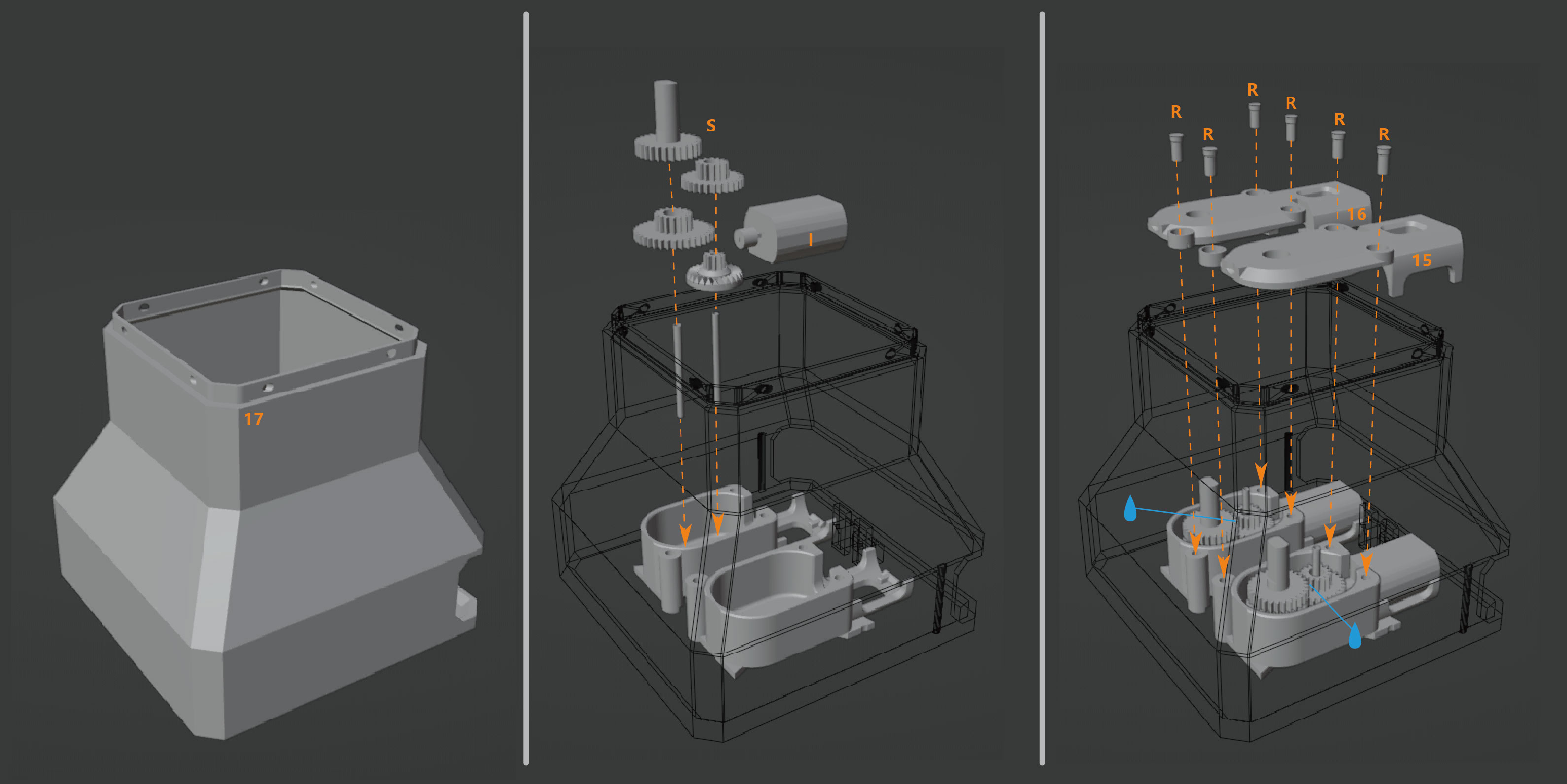
-核心盒安装
-安装核心盒内的两组电机 包括配套的减速齿轮
-在闭合前添加润滑脂 并用官方配套的组件螺丝安装电机盖
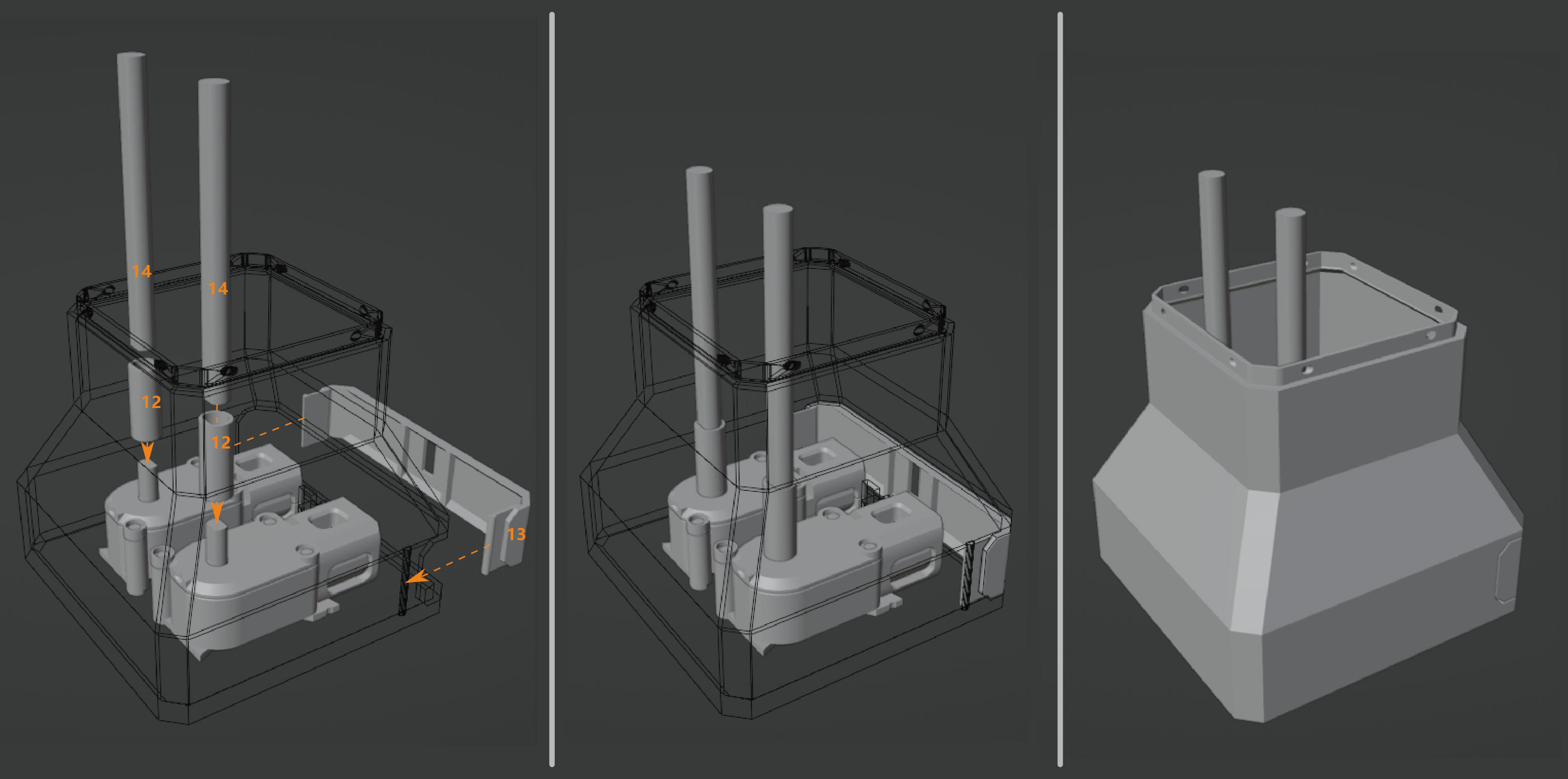
-套入转换轴与转动轴 传动轴可以用金属替代
-安装开关盖
-核心盒安装完成
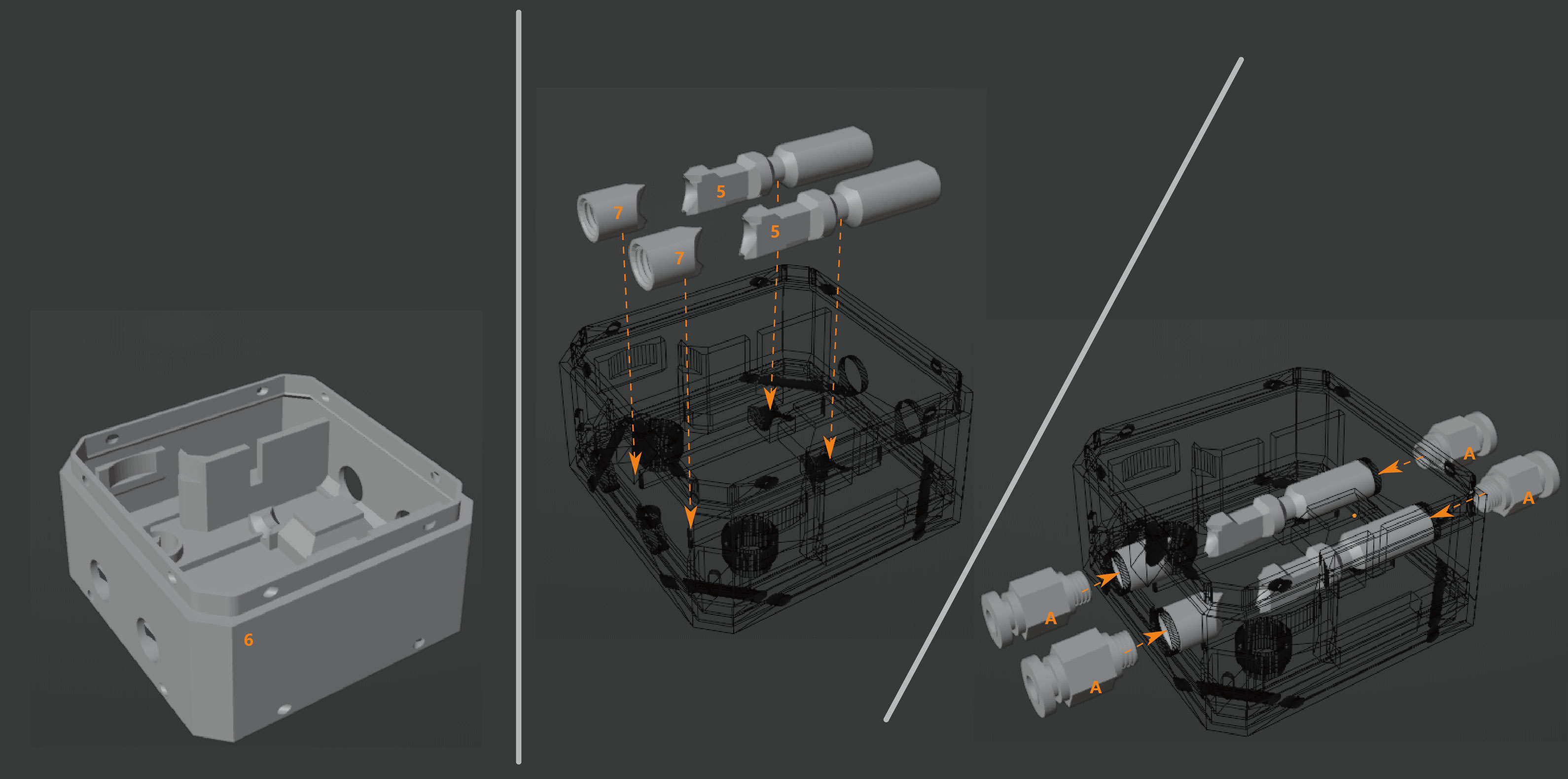
-首层安装
-把长料口和短料口卡在底板卡位 注意料口方向 料口顶边有平面 底边则带有与底板配套的凹槽
-拧入气动接头
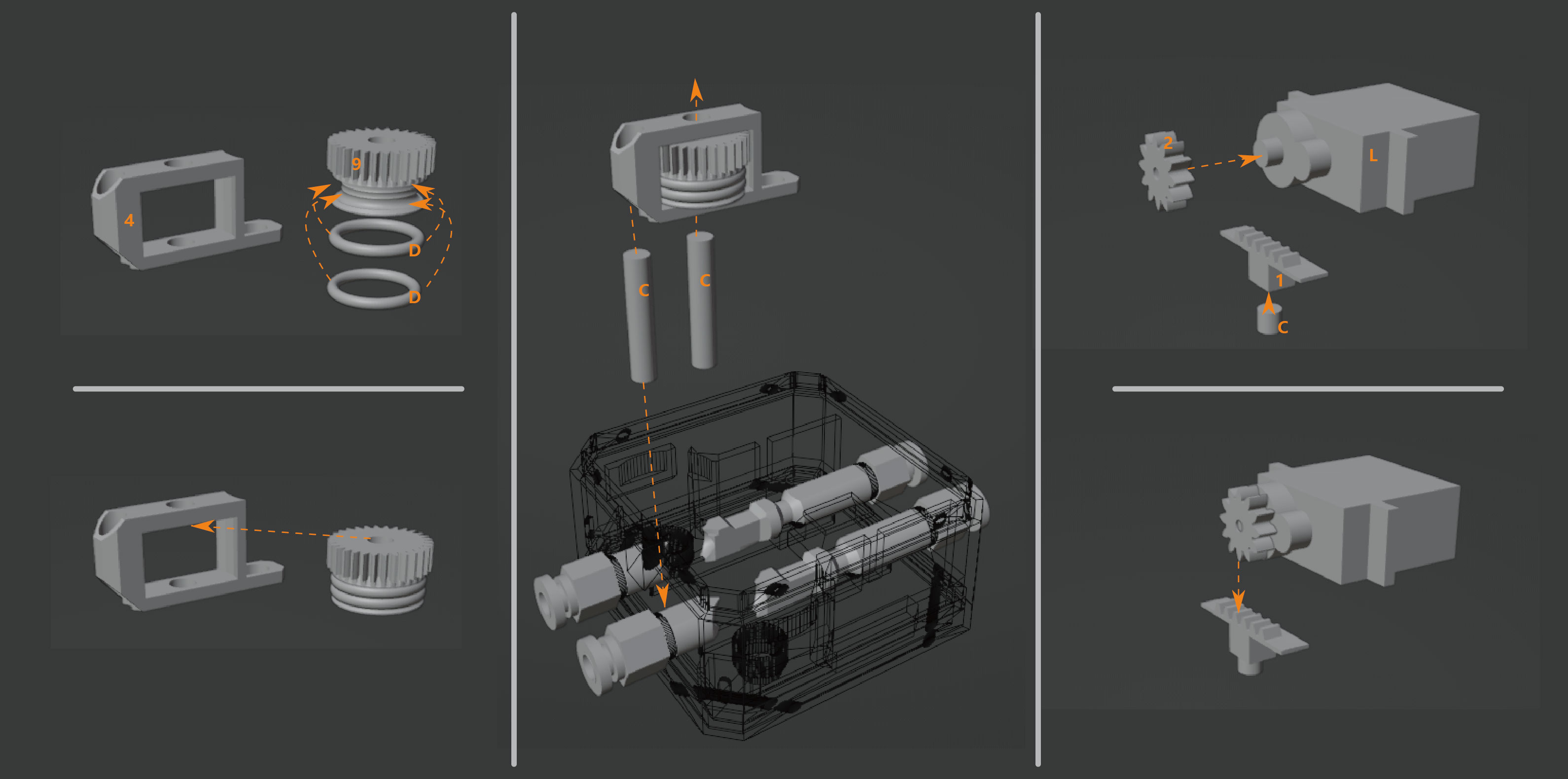
-把两根O圈套入活动齿轮中
-把齿轮放入通道选择件当中 放入前打磨通道选择件的内角 确保转动畅顺后插入一根特氟龙管 管两端修剪不要出头
-在通道选择件前端也插一根管 然后卡扣在底板前端中心的凹槽 形成一个可以左右摆动的结构
-把舵机齿轮安装在舵机上 确保其中一个齿处于转动中心的正下方
-在舵机齿条的凹槽插入一根管 并修剪至突出2mm左右
-舵机齿轮在居中状态应与齿条中心位置咬合
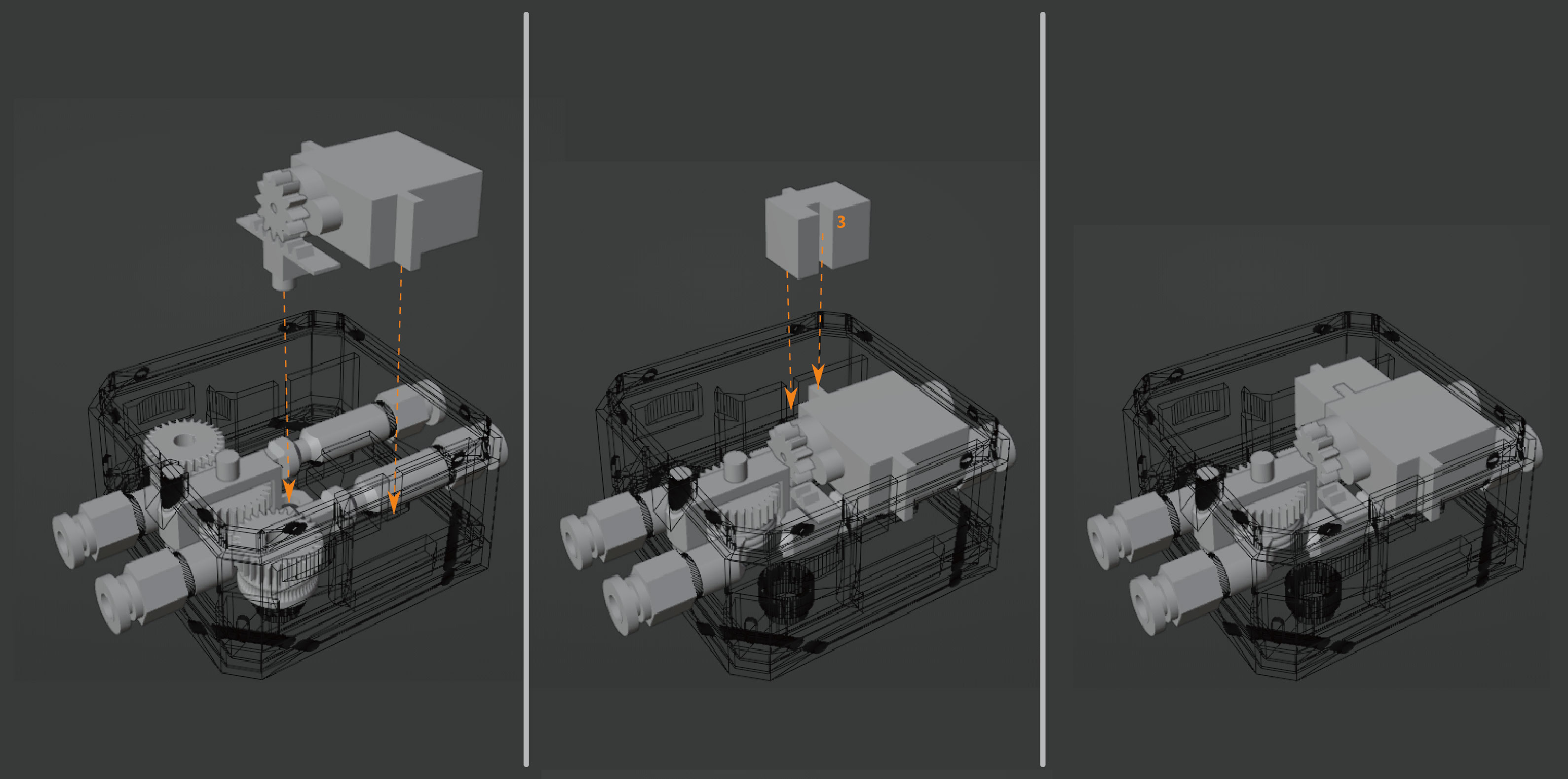
-把舵机与舵机齿条一并安装在底板内 齿条突出的管应插进通道选择件后端的孔中 以带动通道选择件摆动
-把舵机补偿安装在舵机带线一侧 以令舵机转动中心保持在底板中线位置
-以上述同样的流程安装其他3层备用
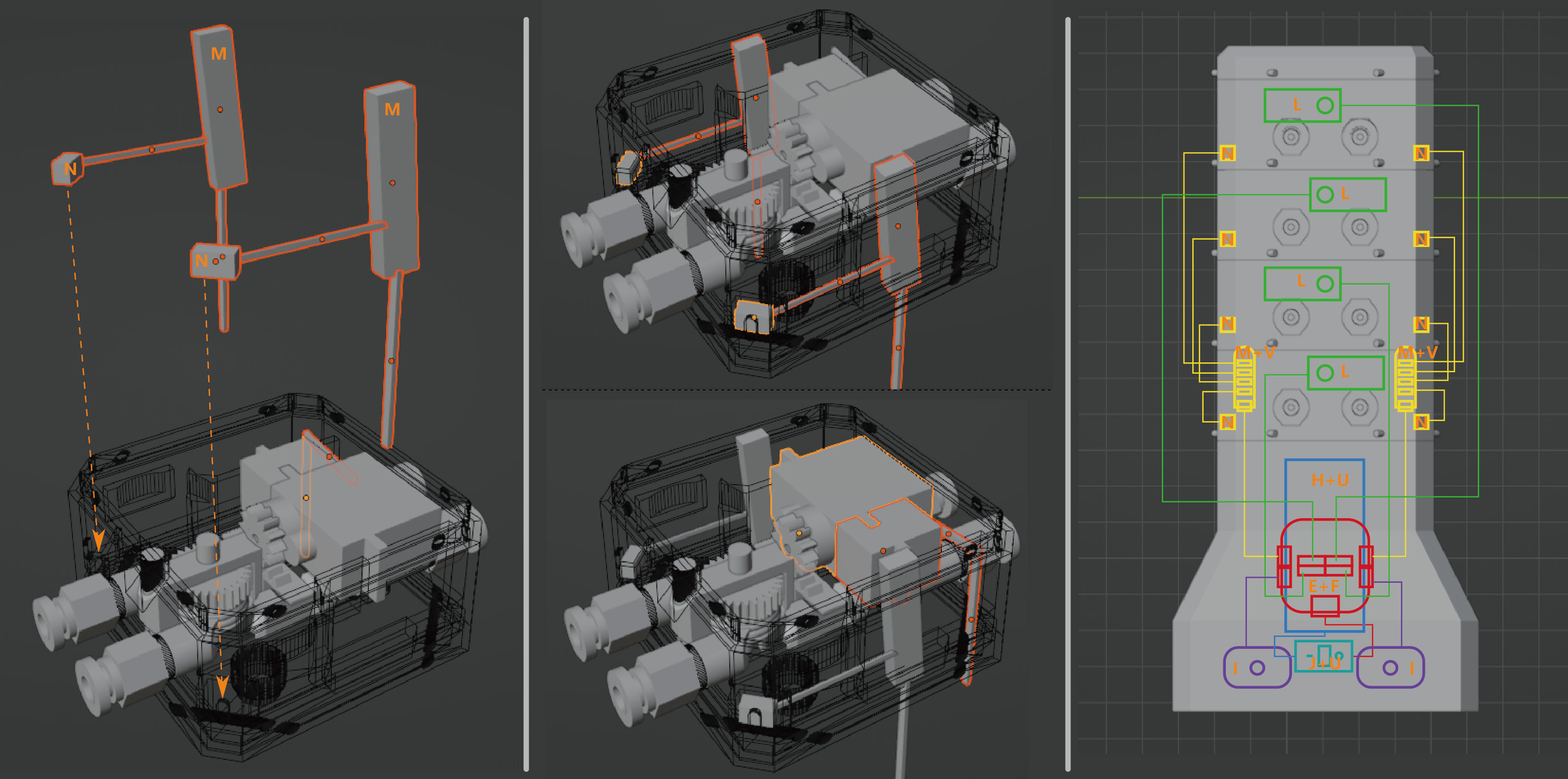
-把灯板与转灯转接板连接 灯板卡在底板前段转角底部位置的凹槽中 理顺走线使至贯通每层的空间中
-每层应使用两套同样线位的灯板 转接板内置在最下层的底板贯通空间内
-舵机的走线也同样通过贯通空间 并如图错层翻转舵机的走线位置
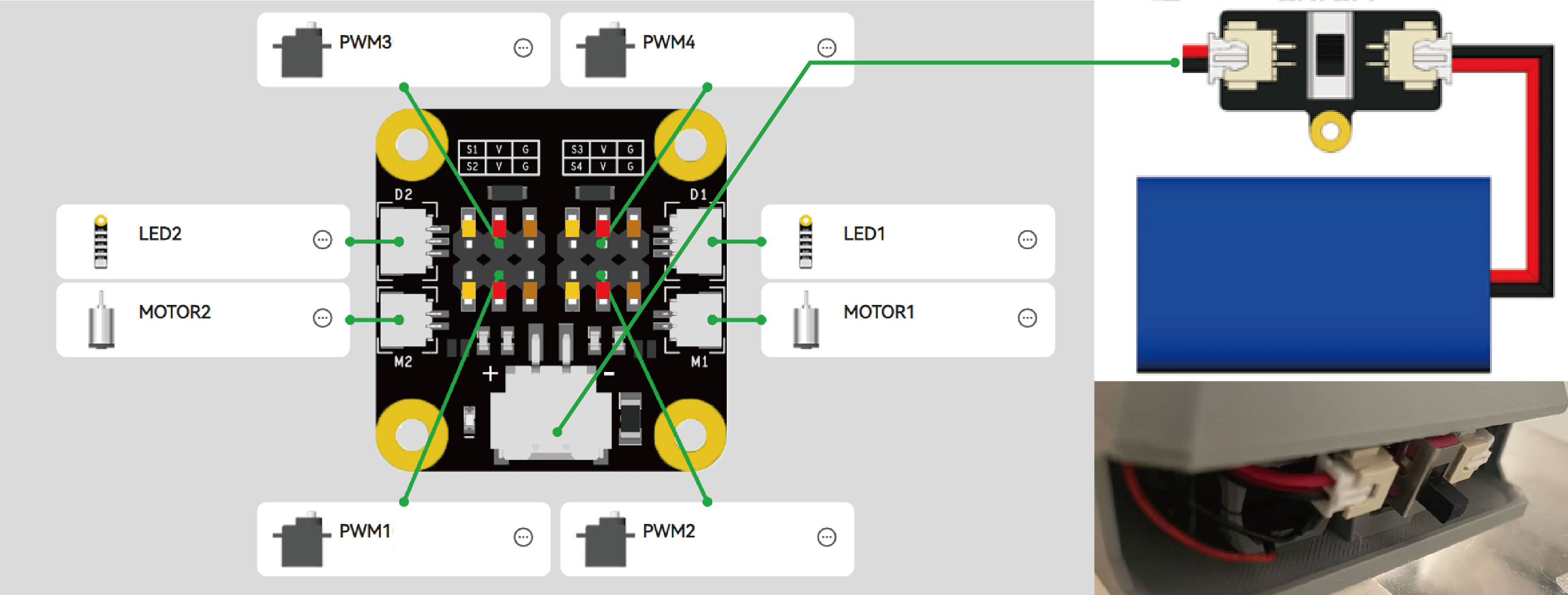
-在进行下一步前需要先接线
-把核心盒内的两组电机(MOTOR1/MOTOR2)连接到遥控接收底板的对应位置
-把两组灯转接板(LED1/LED2)连接到遥控接收底板的对应位置
-把四组舵机(PWM1/PWM2/PWM3/PWM4)连接到遥控接收底板的对应位置 注意导线颜色
-把锂电池的接线穿过核心盒底部开盖 并在外面连接开关
-把开关到接收板的接线在另一侧穿过底部开盖 并在盒内连接接收板
-把接收板 锂电池塞入核心盒内 无固定位置 只要不妨碍传动轴转动既可
-最后把开关卡到两组电机后端之间的凹槽处 不需要要固定 后续锂电池充电也需要拿出来拆开 用官方配套的充电器充电
*在充电前请详细阅读套件的使⽤说明书以及相关安全事项 具体请参考 CyberBrick官⽅⽹站和套件使⽤说明
-合上开关盖即完成接线
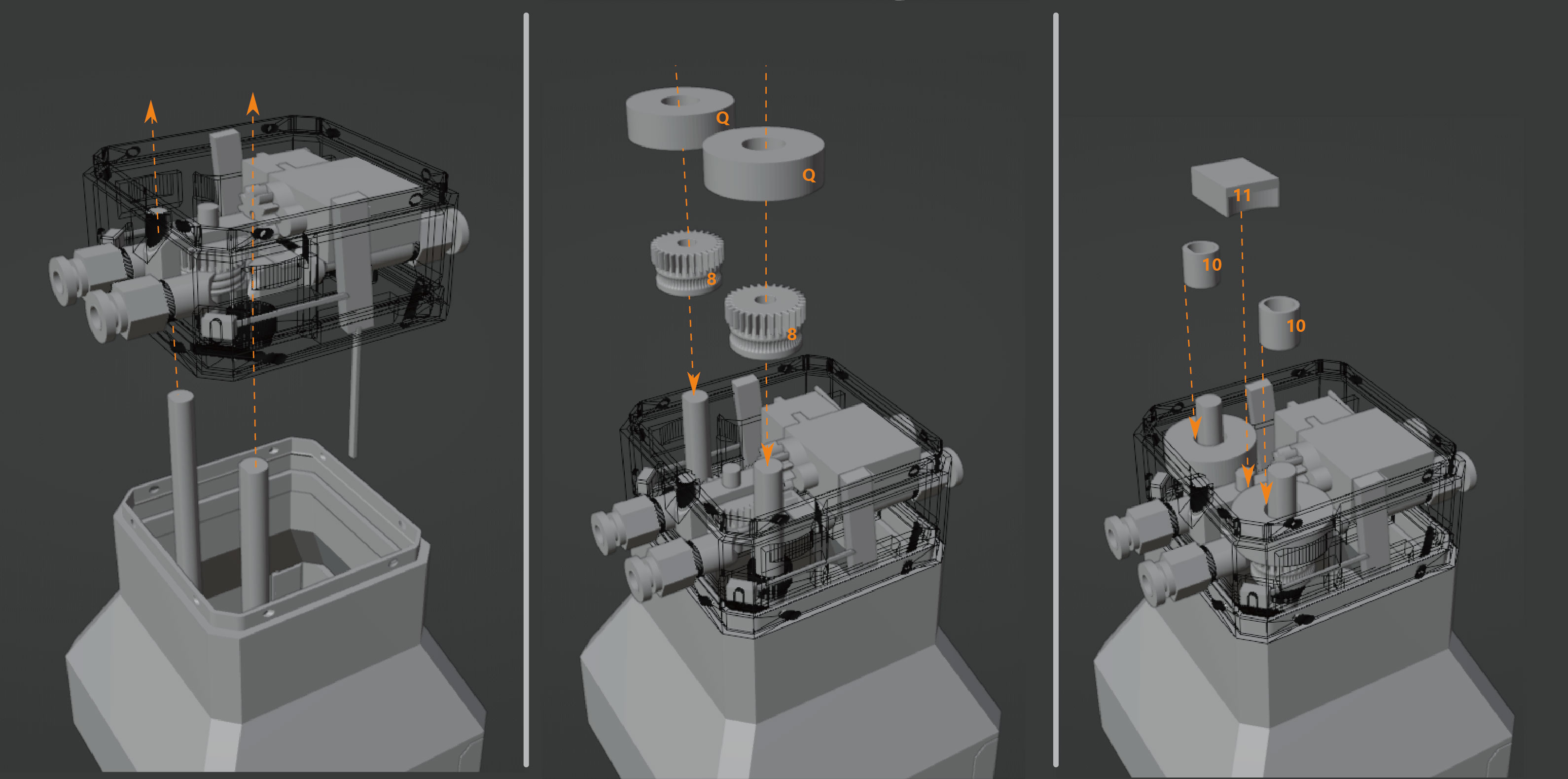
-把核心盒的转动轴穿过首层底板前端的圆孔 并把首层扣入核心盒
-安装两组固定齿轮和608轴承套入传动轴
-把轴承补偿套入传动轴与轴承之间份缝隙 把轴承固定件扣入两个轴承之间
-另外3层重复以上操作 需要注意第二层的固定齿轮需要刚好承接上下两根传动轴 如果出现错位 需要自行在切片软件里调节传动轴长度
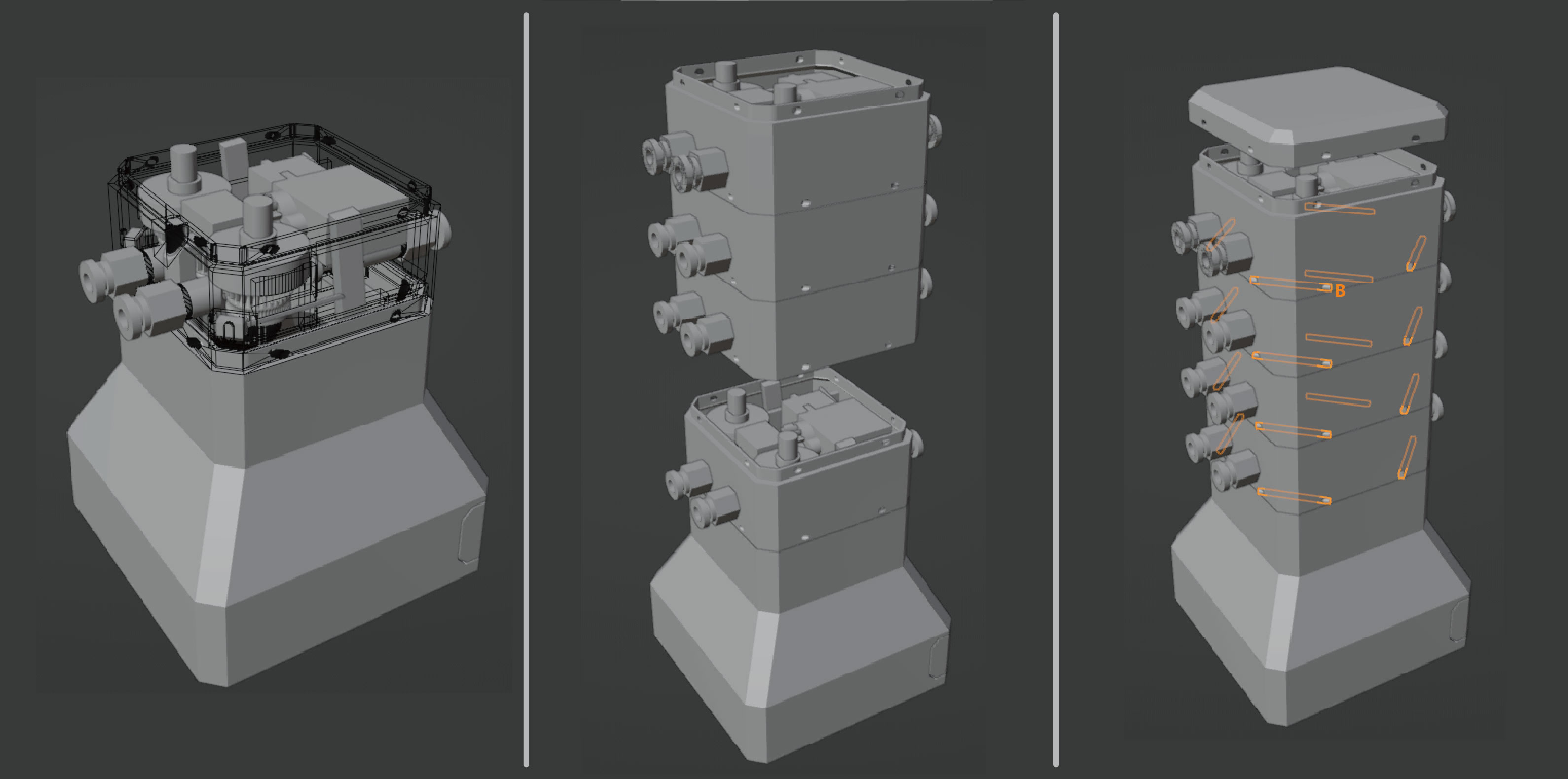
-合上顶盖 在后续安装完成测试一遍过后 用PETG线材当插销固定
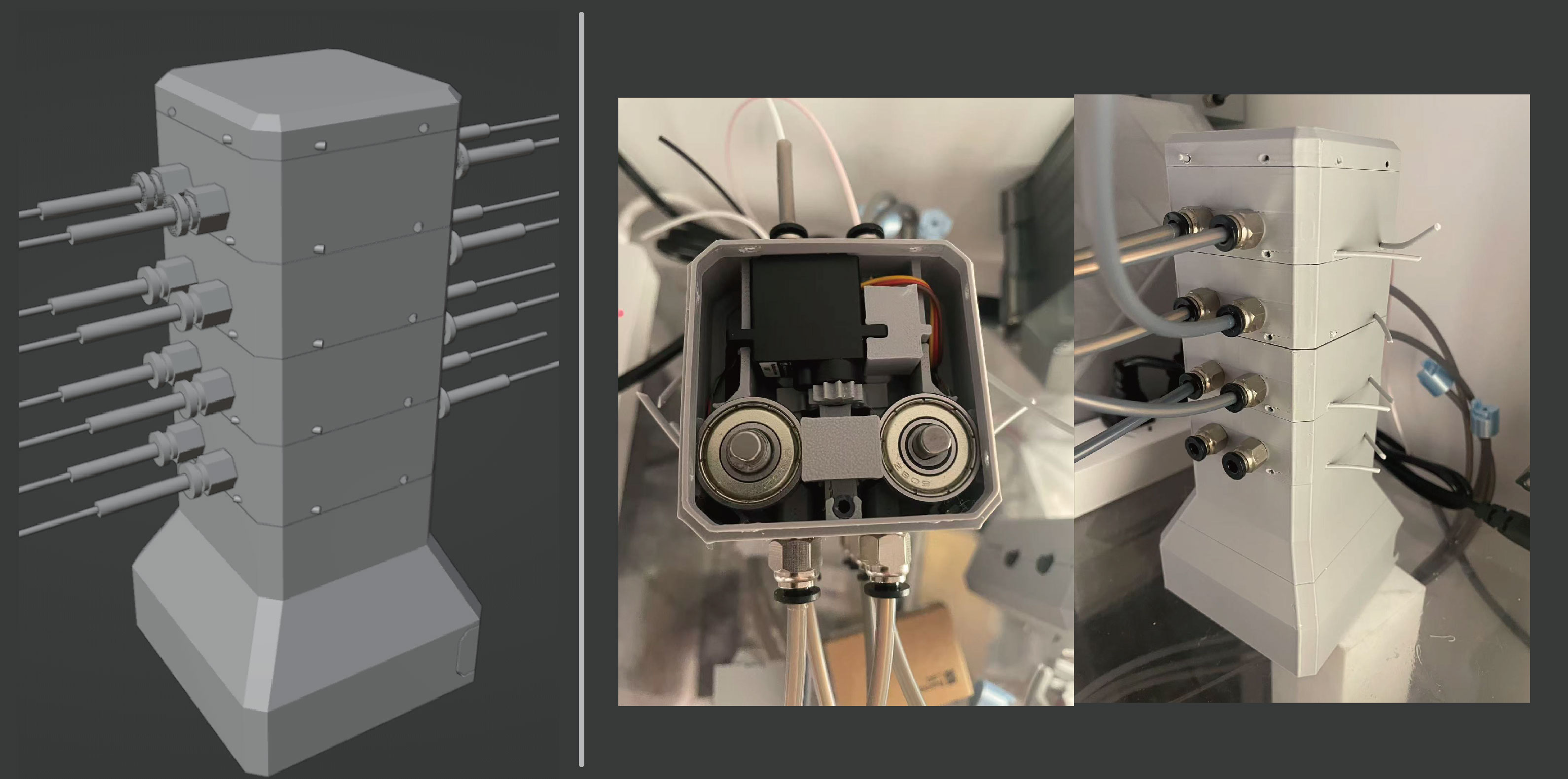
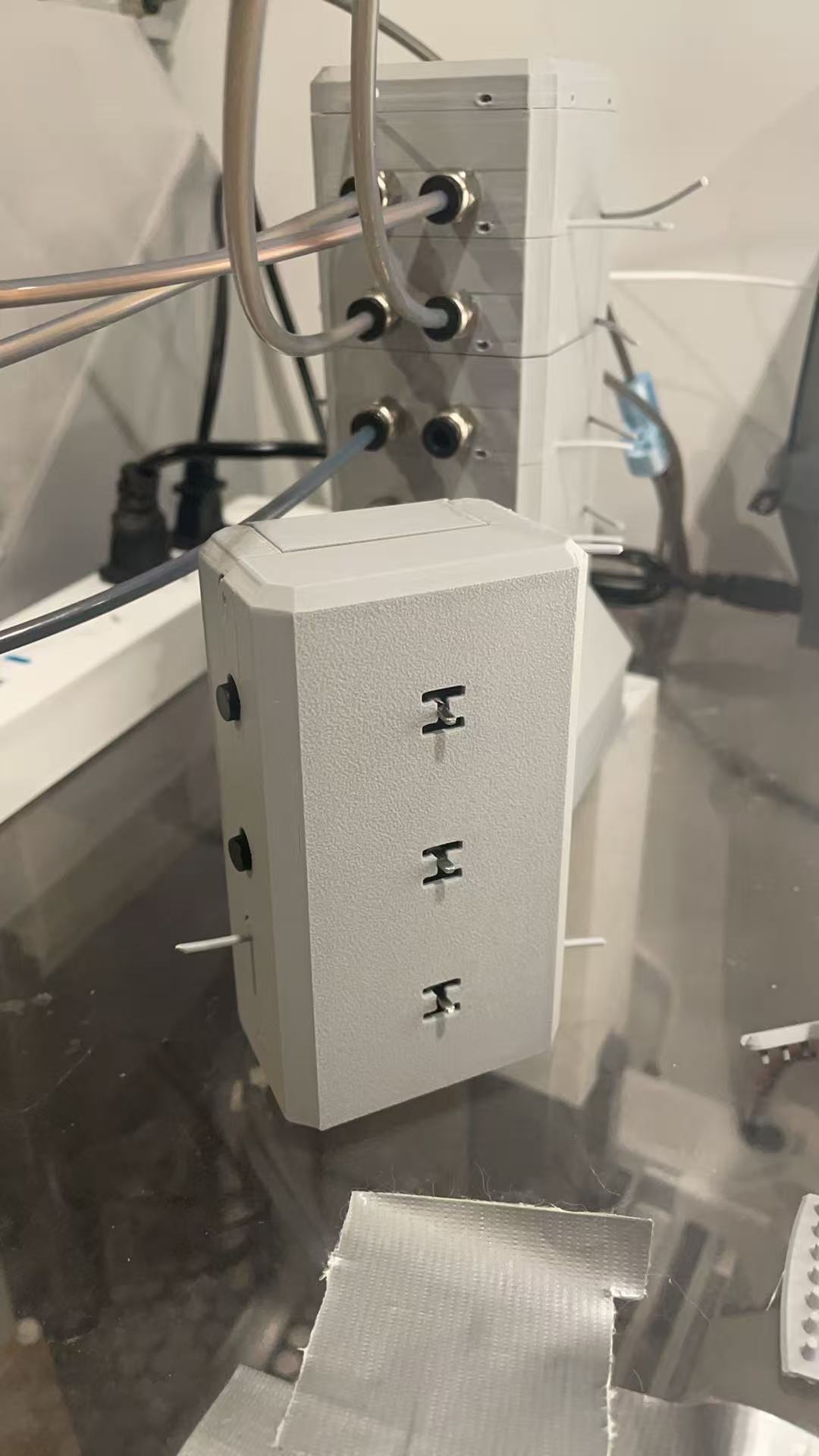
-主体最终效果
-内部及外观实物图
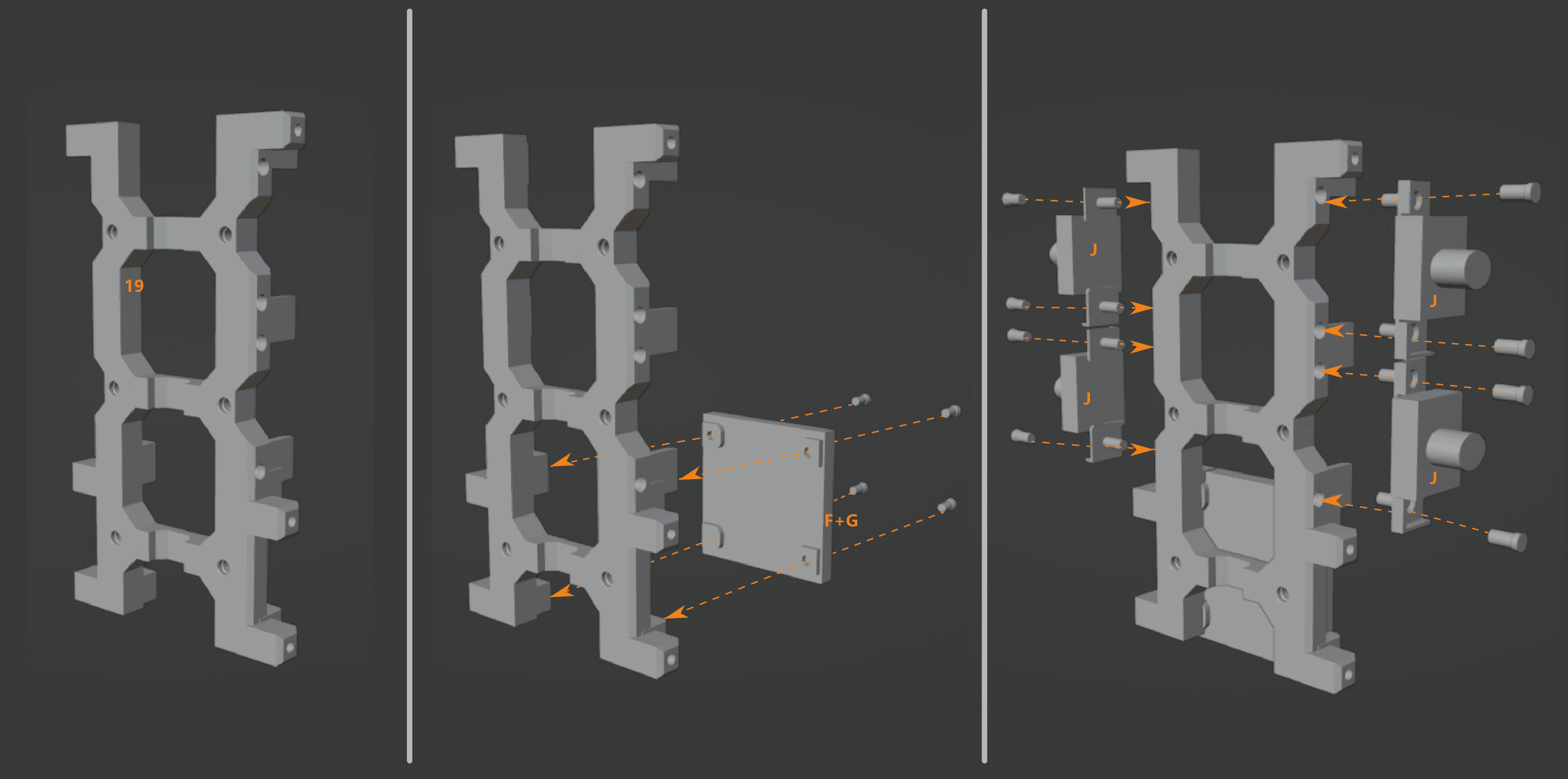
-遥控器安装
-把遥控发射底板安装在组件支架背面 注意电池接线和四个按键板接线侧朝下 配套螺丝固定
-把四组按键板安装在组件支架的两侧 配套螺丝固定

-把3组双通道摇杆从上往下逐个安装在组件支架的正面 需要注意接线口朝下 配套螺丝固定
-把电池盒放在组件支架的背面 带开关那面朝外 接线可以从上端绕过前面到下端在绕回后面接上发射底板
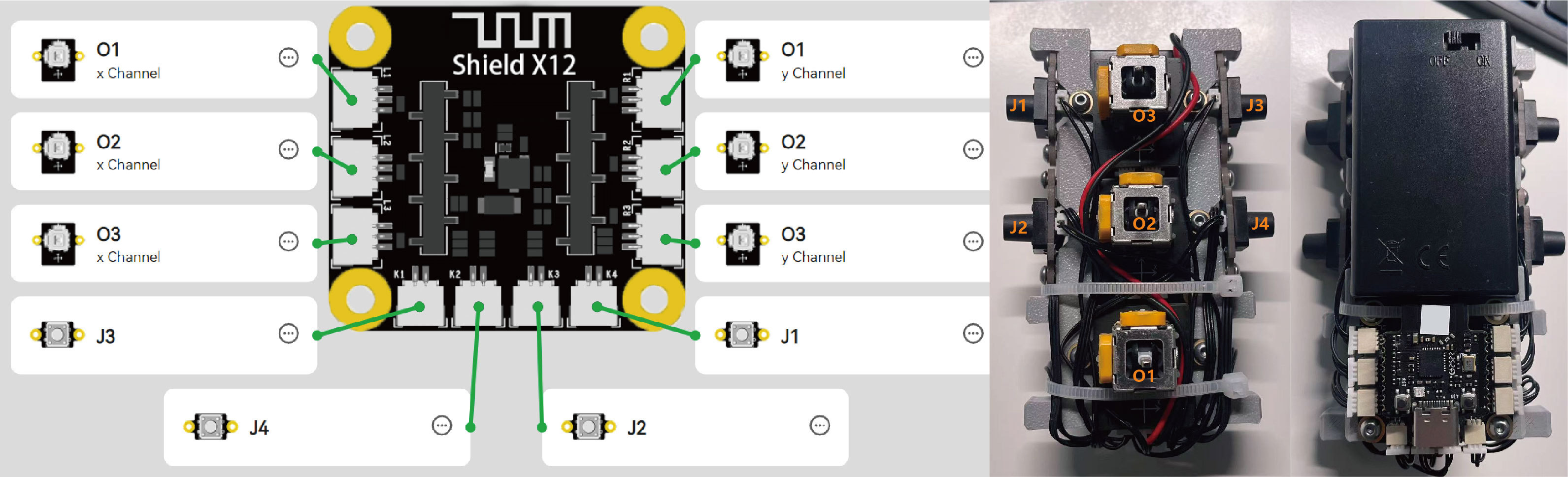
-合上面板前需要接线
-把3组双通道摇杆(O1/O2/O3)的XY通道连接到遥控发射底板的对应位置
-把按键板(J1/J2/J3/J4)连接到遥控发射底板的对应位置
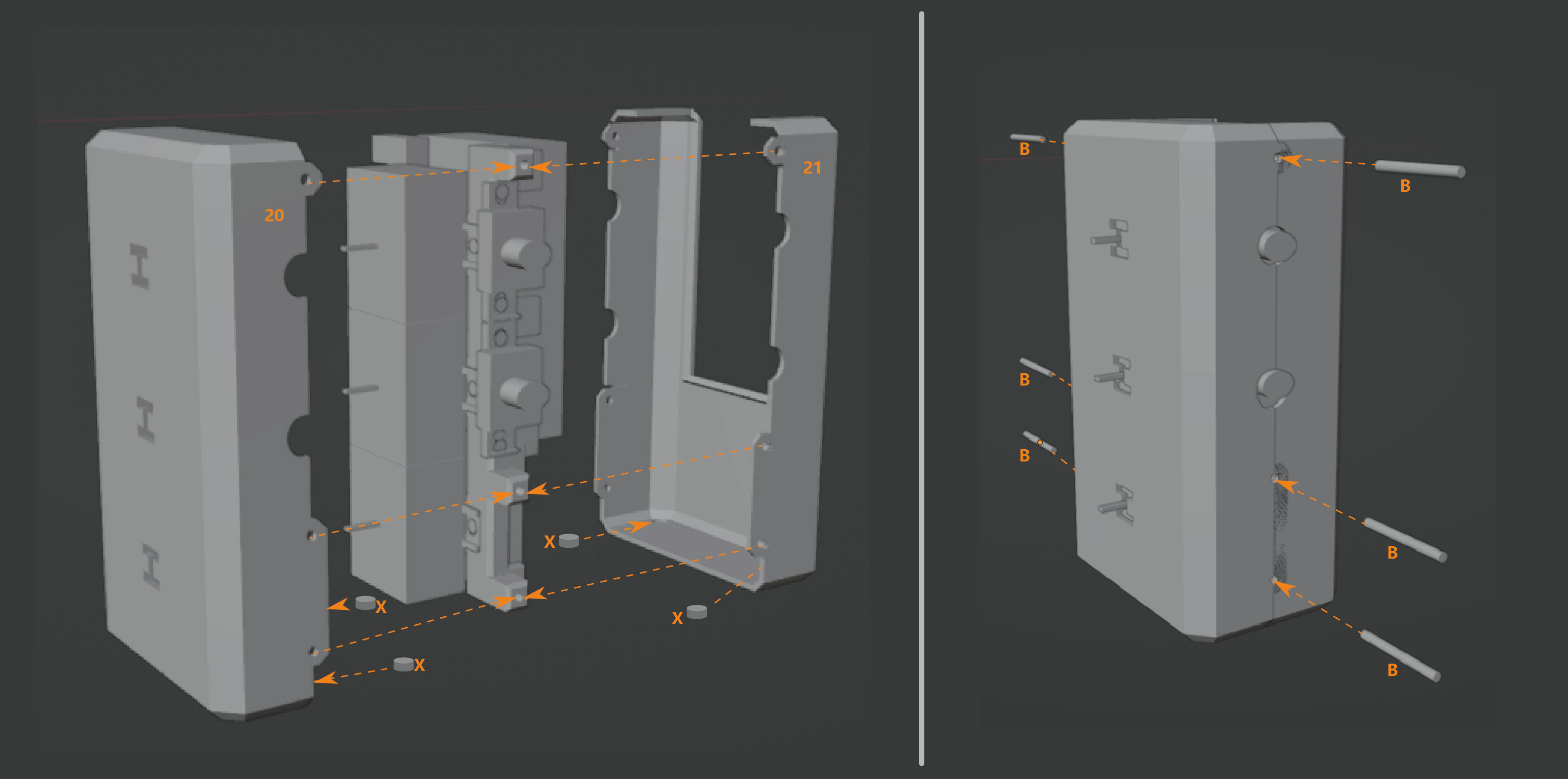
-在面板和背板底部嵌入磁铁 注意磁极方向
-合上面板和背板
-用PETG线材当插销固定 穿过面板背板 插进组件支架的侧面对应位置
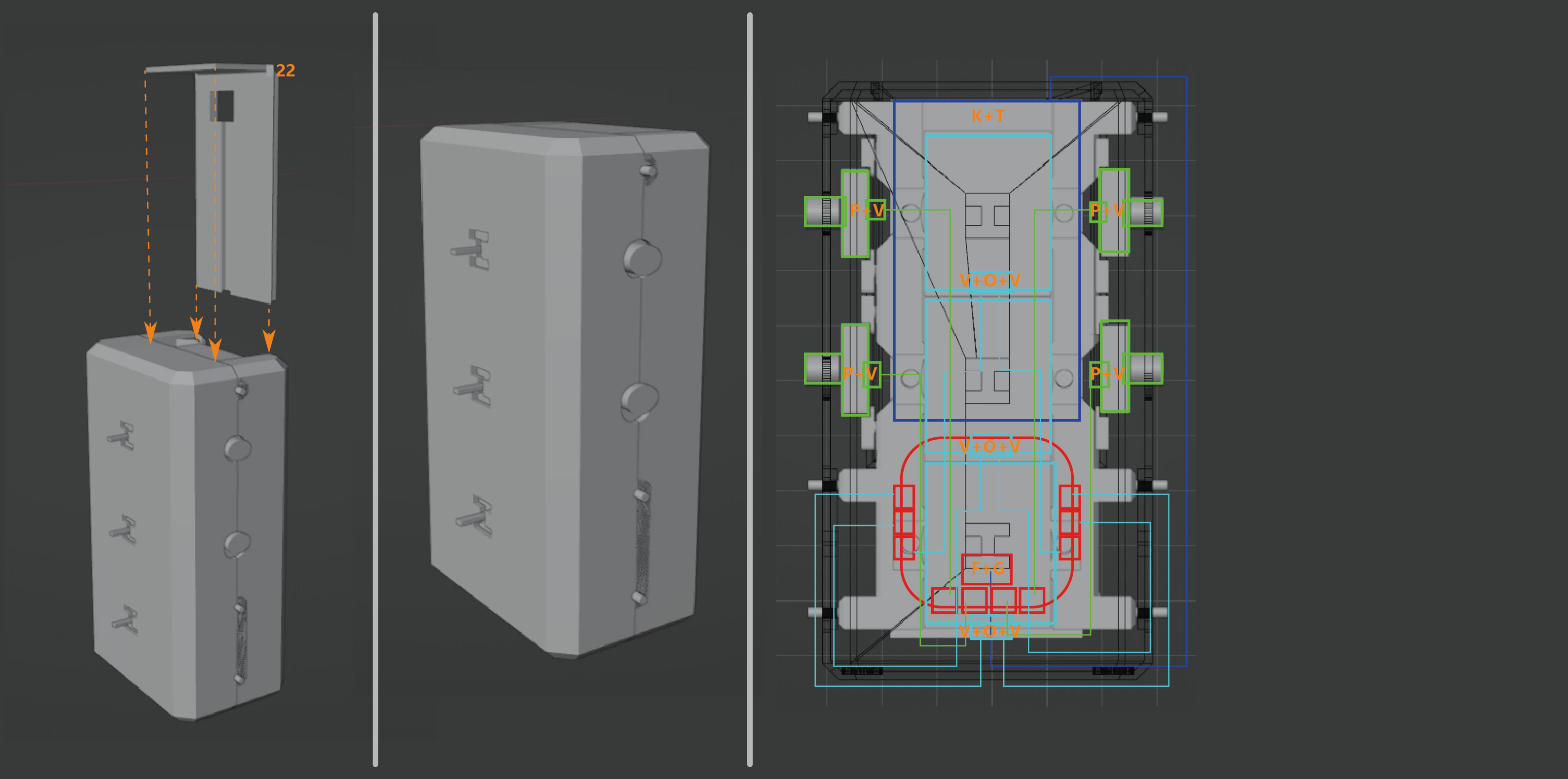
-最后把电池盖滑动合上 用于后续跟换电池
-遥控器组装完成
-使用官方CyberBrick软件录入操控配置文件【RMS.json】即可测试使用
成品展示:

-关于灯光指示

摇杆下推 双红闪烁 表示退料转动(具体表示方向视乎耗材进入方向 默认是从正面进入)


摇杆下推后左移或右移 一青常亮一红闪烁 表示青色通道在退料

摇杆上推 双绿闪烁 表示进料转动


摇杆上推后左移或右移 一青常亮一绿闪烁 表示青色通道在进料
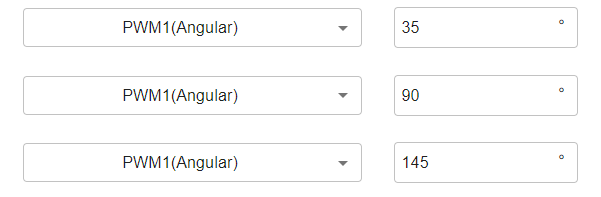
-关于调整舵机 转动选择我预设的角度是35-90-145
当出现耗材带动不了的情况 可按每1度加减调节 90度为居中
-关于调整固件位置 当出现组装的组件和程序位置不匹配时
可以通过软件内拖动接口位置来交换匹配接口
-关于8进4通道的转接模型 建议使用通过切割特氟龙管贯通内部形式的模型
PS:关于上个版本有很多反馈挤出齿轮打滑的问题 这个版本活动轮使用传统O圈的确效果会更好 然而这个版本虽然依旧是使用基于Creality K1挤出机齿轮的模型 但并不兼容金属K1挤出机齿轮作为替换 原因通道选择靠的是舵机转动 而舵机的扭力不足以令金属齿轮咬进耗材里 同时固定齿轮是一直处于触碰耗材 如果固定齿轮也用O圈的话 阻力会影响打印 最终这个方案的结果就是需要固定轮打滑 然后靠活动轮选择带动耗材
以上希望对你有所帮助 如有问题欢迎留言
